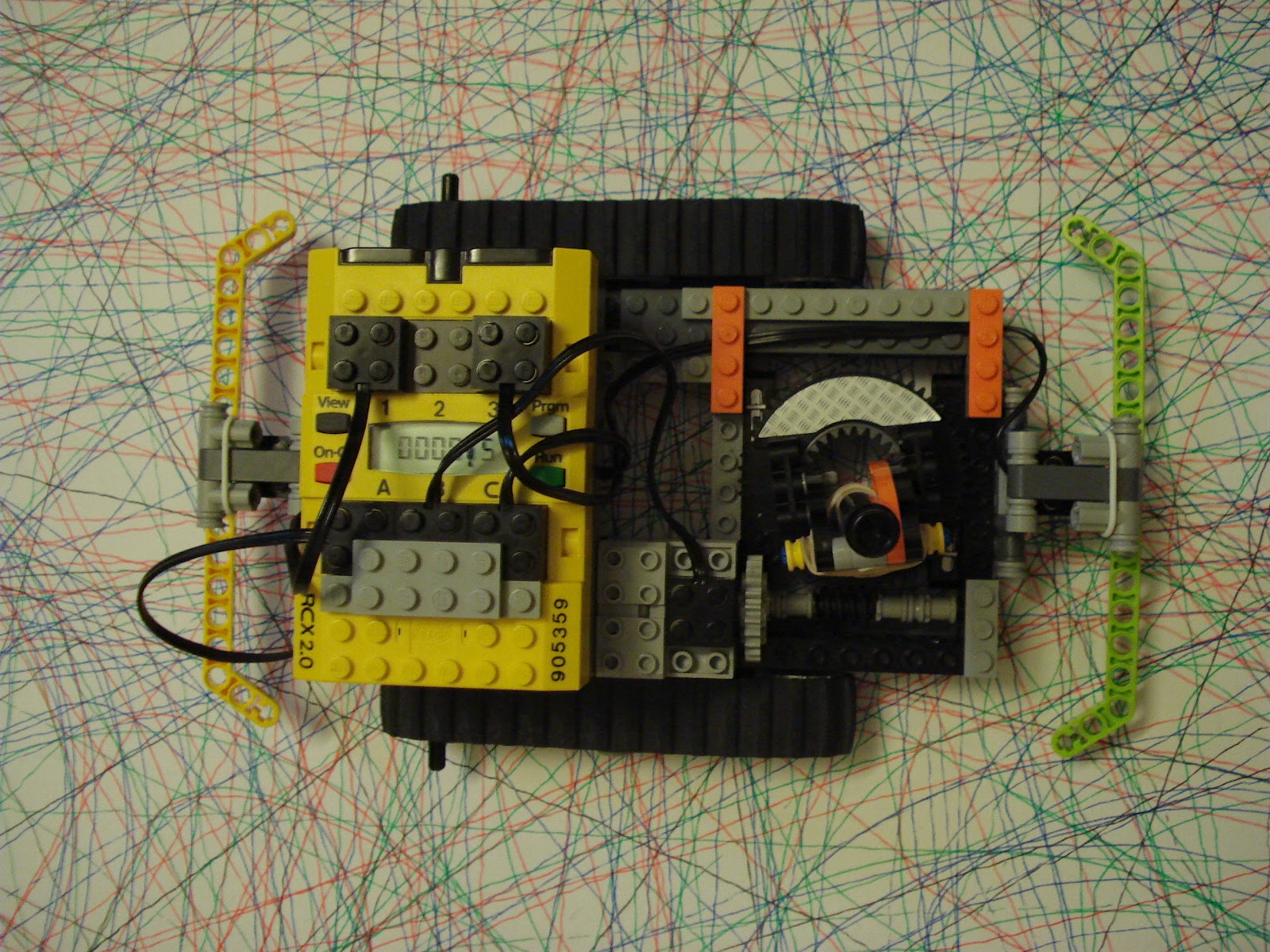
LEGO RCX TURNTABLE ROBOT
Rear Touch Sensor
Front Touch Sensor and Pen
LEGO RCX TURNTABLE ROBOT
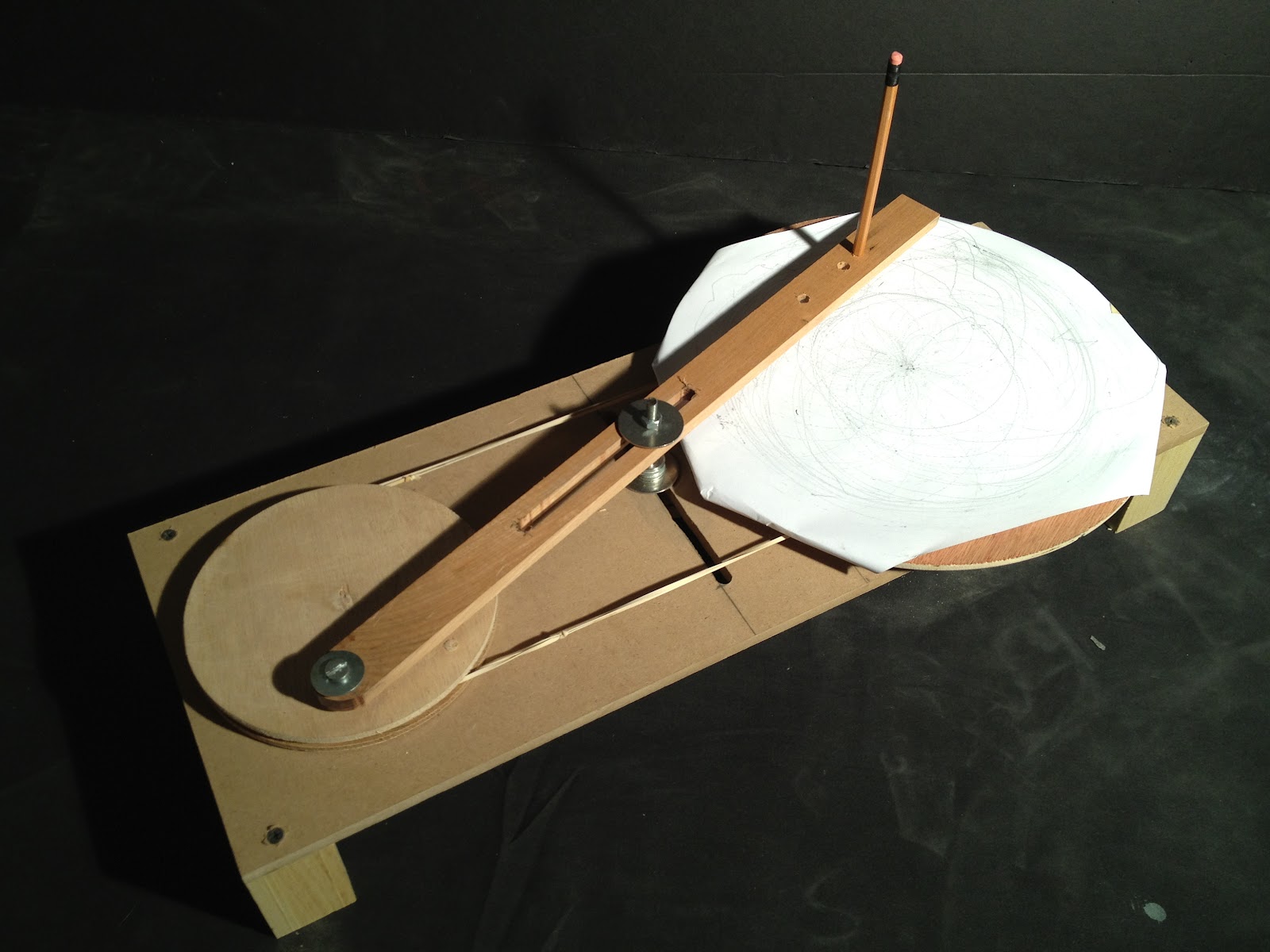
This Robot Is designed to draw in a circle as it drives forward. It is a
take off of my First LEGO Machine where it was controlled by one
motor. This Robot has 3 motors and 2 touch sensors. It is controlled
by a LEGO RCX 2.0 Programmable Brick. 2 of the motors control the drive
of the tracks. The tracks are controlled independently. The third
motor controls the pen. The touch sensors are located in the front and
rear of the Robot. The Program for this Robot is designed to drive
forward until the front touch sensor hits the frame of the drawing
area. This tells the Robot to back up strait for one second. Then the
"drivers" side track stops for two seconds while the passenger side
tracks continues to drive backward. After that both tracks drive
backward until the rear touch censer is activated. That causes the
Robot to drive forward for one second then the passenger side track
stops for 2.5 seconds. After that both tracks start driving forward
until the front sensor is activated and the whole process starts again.
The Robot keeps driving back and forth on the paper until someone stops
the program or the battery dies. I have run it non-stop for 15
minutes. Below is a couple of videos of the robot running.

Top View of LEGO RCX TURNTABLE ROBOT
LEGO RCX TURNTABLE Robot on drawing showing the exterior frame that is 36" by 36"
Full Drawing with 4 colors, Blue for a total of 22 minutes, Red for a total of 16 minutes, Green for a total of 20 minutes, and Black for a total of 13 minutes
Close up of Drawing
(Above) LEGO RCX ROBOT running for about 2 min.
The machine is created completely by me (Tim Morrison) without directions.



















































{kind=link}